| Parameters | 
 |
|
| Mars01H | ||
| Operating Principle | TOF (Time-of-flight) Depth Camera | |
| Chip Platform | Sigmastar9211 | |
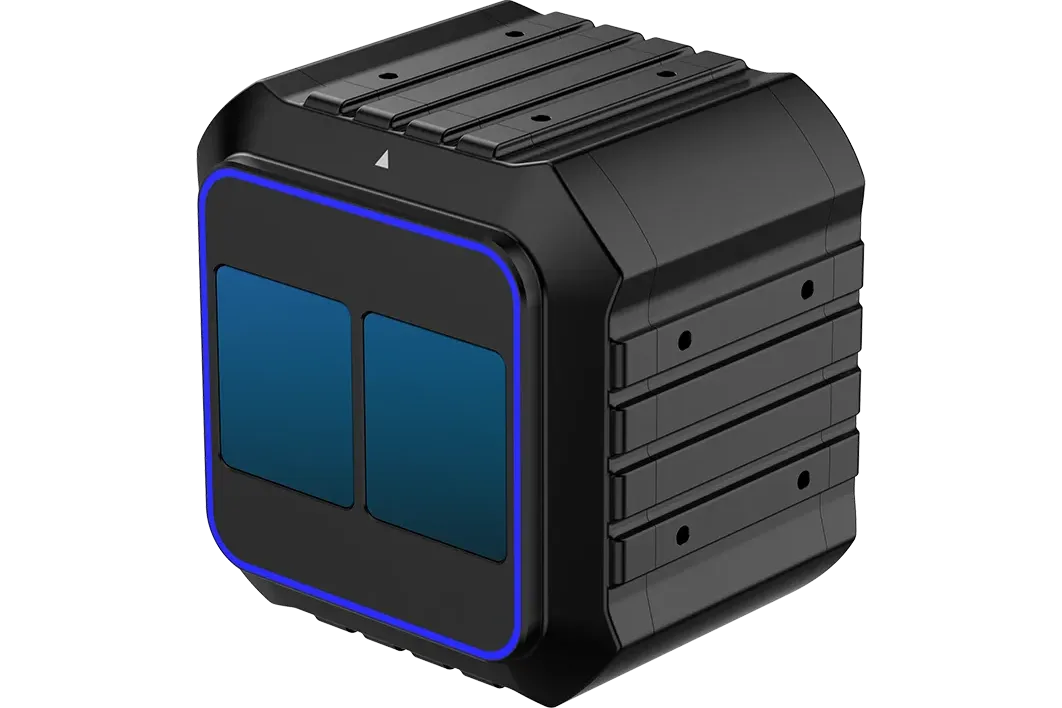
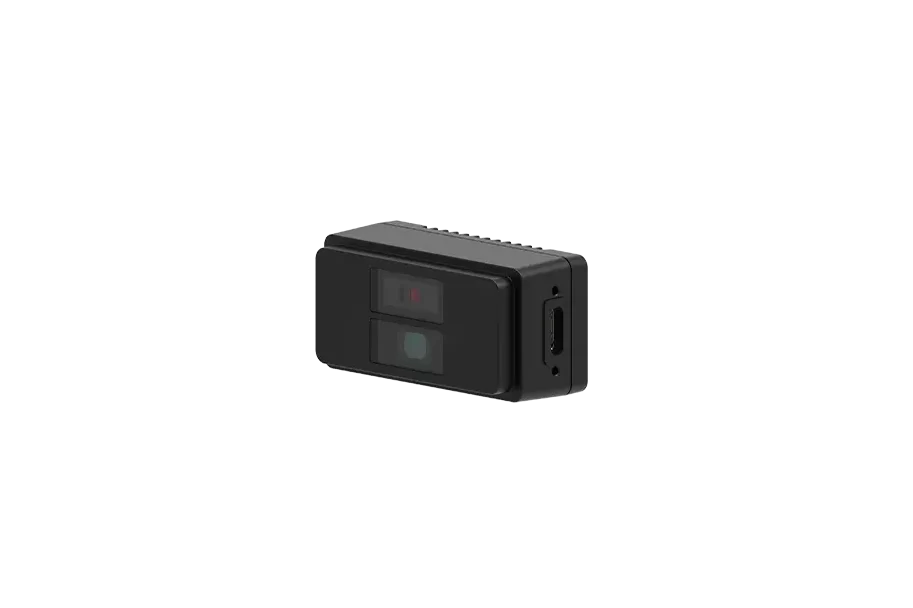
| Laser | 850nm VCSEL*2 | |
| Working Range | 0.05m~2.5m | |
| Ranging accuracy | 0.05~0.4m ≤2cm,0.4~2.5m<1% | |
| FOV (H x V) | 120° x 56° | |
| Resolution | 224 x 109 pixel | |
| Frame Rate | 10 fps | |
| Human Eye Safety | Class 1 | |
| Function | HDR Function | Supports HDR function |
| Exposure Time | Supports exposure time adjustment | |
| Filter | Supports multiple filter settings | |
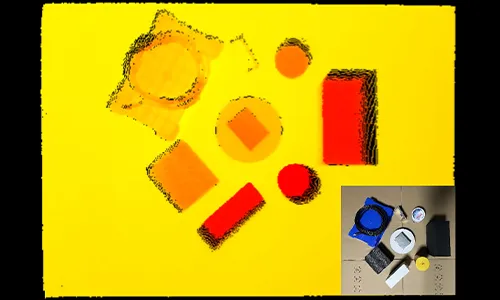
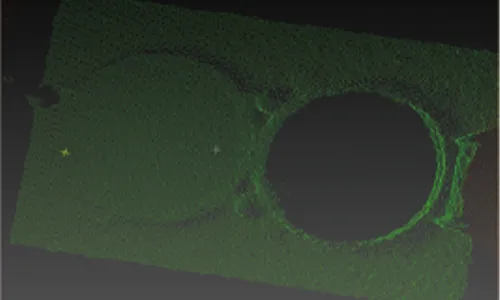
| Output Data Type | Depth map, IR map, point cloud | |
| Power Consumption | 1.4W | |
| Network Interface | USB 2.0 | |
| Power Interface | USB 2.0 | |
| Physical | Dimensions( LxWxH ) | 44mm x 25mm x 21.4mm |
| UVC protocol | Support | |
| SDK | Windows x86/x64, Linux Ubuntu 14.04/16.04 | |