
D3C Series 3D Camera
Industrial high-precision RGBD 3D camera
The product has millimeter accuracy, supports point cloud and RGB alignment, can reach to microsecond synchronous output of RGB images and ToF images, supports global-shutter image sensor technology. It can reach to high-precision edge segmentation, and captures the object’s three-dimensional data accurately, which can meet the requirements for applications in complex environments.
Features



| Product Number | LWP-D301C | LWP-D302C | ||
| Working Principle | ToF+RGBD | |||
| Sensor | Sony DepthSense® ToF IMX570 | |||
| Laser | 940nm VCSEL*2 | |||
| Working Distance | 0.4m~5m | |||
| Ranging Accuracy | < 1 % ( @ 2m≤5mm ) | |||
| ToF Field of View (H x V) | 70°x 50° | |||
| RGB Field of View (H x V) | 70°x 50° | |||
| ToF Resolution | 640 x 480 pixels | |||
| RGB Resolution | 1600 x 1200 pixel (global exposure) | |||
| Frame Rate | Max.30 fps | |||
| Eye Safety | Class 1 | |||
| Function | HDR Function | Support | ||
| Exposure Time | Support | |||
| Various Filter Settings | Support | |||
| Output Data Format | RAW12 (depth map, IR map, point cloud) +RGB | |||
| RGB/ToF Time Synchronization | 100us | |||
| Interface | Power Supply | 12~24V DC | ||
| Power Consumption | <10W | |||
| Network Interface | RJ45 1000M Ethernet | Aviation plug: 8 pin*M12 X-code | ||
| Power Interface | 6.4mm DC | Aviation plug: 8 pin*M12 A-code | ||
| Physics | Dimensions (L x W x H) | 116.2mm x 63.5mm x 76mm | ||
| Weight | 680g | 706g | ||
| Operating Temperature | -20 ~ 50 ℃ | |||
| Storage Temperature | -30 ~70 ℃ | |||
| Protection Level | IP42 | IP67 | ||
| Operating System | Windows 10 and above /Linux | |||
Applications
D301C

RJ45 Gigabit Ethernet Cable

Power Cable

Control Line

Parts Package
D302C

M12 8 pin air plug to RJ45 Gigabit Ethernet Cable

M12 8 pin air plug Power Cable
Parts Package

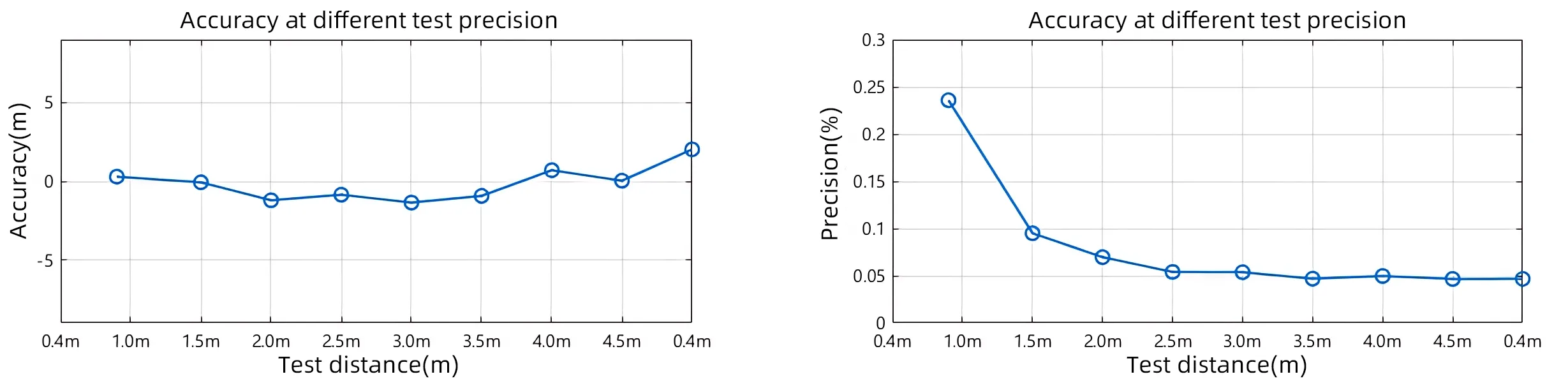
Test Conditions
Test Object: A 2m × 1.5m white calibration board with a reflectance of 90%.
Camera Position: The camera is mounted on an aluminum alloy fixture, with the lens surface parallel to the surface of the calibration board.
Test Preparation: The camera is powered on and preheated for 10 minutes.
Test Environment: Room temperature of 23°C, with an illuminance of 100 Lux.
Test Distances: The distances between the calibration board and the camera are 0.4m, 1m, 1.5m, 2m, 2.5m, 3m, 3.5m, 4m, and 4.5m.
Data Sampling: A 10 × 10 pixel area in the center of the image is sampled, with 32 repetitions taken and averaged.
Product
Q1: Is the light source used in the D3 camera harmful?
A1: All Lomax cameras are class 1 certified for human eye safety.
Q2: When multiple cameras are used at the same time, will there be multi-camera interference problems?
A2: Because the laser wavelength is 940nm, in the same position and time to use there will be multi-camera interference, can be triggered by software or hardware, through the hardware timing control way to solve the problem of multi-camera interference.
Q3: Does the ambient temperature affect the product imaging?
A3: In the use of the environment does not exceed the specifications of the temperature, the stability of the product will not be affected, the product has been done high and low temperature reliability test.
Operation
Q1: The upper computer can’t search the device?
A1: 1. Confirm the power supply of the camera, check whether the camera indicator light is always on.
2. Change the IP address of the host computer and the camera the same network segment, check whether the camera’s default IP address 192.168.1.200 can be PING through.
3. If the above still solve the problem, please contact the engineer support
Q2: How to optimize the point cloud effect for complex scenes, where both high and low reflections exist?
A2: The principle of ToF is to calculate the distance of an object from the camera by calculating the time between the light emitted by the camera and the reflected light received by the camera. Since different objects have different reflectance and absorbance, they will be presented in different states in the image, which can be achieved by turning on HDR, which successively shoots multiple photos of three exposure versions, and then combines these photos into one output. However, when HDR is turned on, the frame rate will drop to a certain extent.
Q3: For specific black objects or the need to detect distant low reflection objects, by how to adjust the way?
A3: By reducing the frame rate, increasing the exposure time by 3000-4000, and turning the confidence filter to 1 or off.
Q4: How to upgrade the firmware of D3?
A4: Through the upper computer software luminviewD in the configuration – update, use the updata_enc.sh file to update the lower computer, after the update prompts the update is successful automatically reboot the device to complete the firmware upgrade.
Q5: How to change the IP address of the device?
A5: The device has two network modes: static IP and dynamic IP address, which can be set in the host computer network configuration, or you can use the provided API to change the network mode.
Q6: The device can be searched by the host computer, but there is no data.
A6: 1. Check whether the firewall is closed.
2. Check whether the network cable is Gigabit network.
SDK
Q1: What development languages and operating systems does the D3 camera support?
A1: Operating system support: Windows 10 64-bit, Windows 11 64-bit, Linux 64-bit. Development language: c++
Q2: Is the distance from the depth map on the camera the distance from the point to the camera point or the distance from the point to the camera face?
A2: The default is the distance from the point to the camera face. When the camera is tested against a wall, each point on the wall has an equal distance value.